




 Location :
Location :
The research team led by Prof. Zhefeng Gong has recently published an article titled "Mechanics of Soft-Body Rolling Motion Without External Torque" in Physical Review Letters on May 16th, 2025. This study reveals the muscle-driven mechanism behind the torque-free rolling motion of Drosophila larvae and validates the findings through a bio-inspired soft robot.
Muscle activation sequence enables self-driven rolling without external torque.
While rolling motion is challenging for most animals (e.g., spiders relying on gravity or caterpillars using abrupt bending), Drosophila larvae can perform continuous, rapid rolling to escape predators. Conventional theories suggested this motion required external torque from gravity or ground reaction forces, but experimental data showed larvae generate tangential forces far exceeding gravity and can even roll upside down.
Through transgenic muscle labelling and light-sheet microscopy, the team discovered that axial muscles alternately contract and relax when larvae bend into a C-shape, creating sequential torque for continuous rolling. Precise ablation experiments confirmed axial muscles' essential role—their removal stopped rolling completely, while circumferential muscle ablation only reduced speed.
The team developed a biomechanical model treating the larva as a fluid-filled elastic cylinder. The model demonstrates: Higher internal pressure enables greater body curvature, enhancing rolling efficiency. Segmented axial muscles generate additive torque. Rolling direction is determined by muscle activation sequence, not C-shape orientation. Motion follows angular momentum conservation in absence of external torque. To validate the model, researchers built a pneumatic soft robot with four inflatable chambers mimicking muscle activation. Despite using elongation (rather than contraction) for actuation, the robot achieved continuous rolling with larval-like robustness, even compensating for failed chambers. This work not advances understanding of neural circuits controlling soft-body locomotion but also provides design principles for bio-inspired robots. The torque-free mechanism could enable future robots to navigate complex environments without relying on external forces.
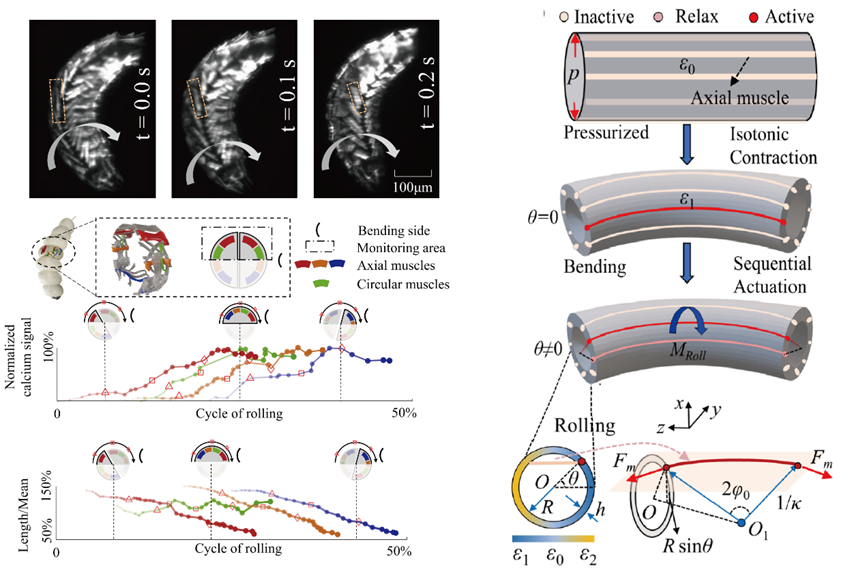
The muscle contraction sequence of the rolling behaviour in larvae and its mechanical model
Website: https://journals.aps.org/prl/abstract/10.1103/PhysRevLett.134.198401
ZHEFENG GONG'S RESEARCH GROUP: The team studies neural control mechanisms of soft-body movement using Drosophila larvae as a model organism, with applications in bionics and robotics. Their work has been published in Science, Nature Communications, Current Biology, and Physical Review Letters.

